
理想产品经理科普端到端 VLM 智驾辅助驾驶
快科技10月29日消息,理想汽车行业的“端到端 VLM”智能驾驶,已向全量车主开启推送,全新一代智驾具备更安全、轻松的特性,驾驶风格更像老司机。
日前,理想汽车发布了理想智能驾驶产品经理科普理想端到端 VLM智驾的科普视频。
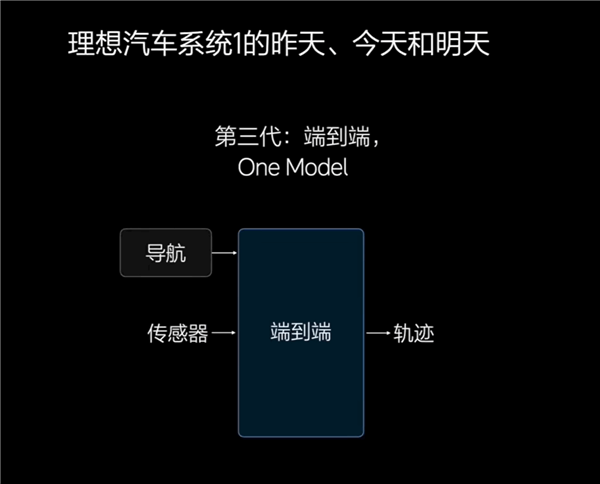
据其介绍,端到端是指一端是传感器,另一端是行驶路线,之前的智驾算法多半是规则式的。
首先由感知系统去识别路况,规划系统根据感知信息去计算出一条行驶路线,最后由控制系统去执行这条路线,决策什么时候加减速和转向。
每个系统都相对独立,需要按序就班工作,由于每一个步骤都需要计算时间,因此系统的整体响应会偏慢。
比如前方有一辆车辆切入我们的车道,当执行完这一系列步骤之后,可能会错过最佳制动点,刹车不稳引起体感不适,或者在前车驶离之后,无需刹车时还在刹车。
而端到端是把这一系列步骤全部交给一个大脑来执行,由它来接收所有传感器数据,然后直接输出行驶路径,无需拆解成多个步骤,这就是端到端。
同时,传统规则的算法对于每一个场景的应对,都需要工程师提前写入规则才能处理。而现实世界的情况是无穷无尽的,总会有一些超出我们意料之外的情况。这时候就可能会导致车辆无法计算出路线而停在原地。
而端到端能够通过充分学习人类的驾驶数据之后,能够计算出对应的驾驶策略。
至于VLM视觉大模型,相当于人类应对复杂场景的思考和推理能力,端到端可以快速搞定大部分基础日常出行场景,但还有一部分场景需要推理思考才行。
比如遇见公交车道时,首先要去思考为什么车道线的颜色不一样,然后去识别文字信息,判断自己是不是属于限行车辆,最后去对比一下限行时间,决策是不是立刻要驶离公交车道,这就是VLM的作用,去理解这个更复杂的世界,做出正确的决策。

例如,VLM视觉大模型可以帮助智驾能够更精准的识别应对坑洼、减速带、施工、丁字路口、夜晚无灯、主辅路进出等场景,做到提前减速,安全通行。
总的来说,VLM相当于端到端的副驾做了一个教练,当端到端走错路或需要帮助时,VLM可以主动提供建议,帮助端到端开的更好。
相较于无图NOA智驾,端到端 VLM智驾,智驾轨迹更拟人,通行更高效,驾驶更安全。
